Приложения.
Команды, подаваемые собаке свистком
Команды, подаваемые собаке свистком
В заключении хочу сказать о самом главном, на мой взгляд, в натаске: об отношениях собаки и хозяина.
Одну и ту же фигуру «двойной крест» можно использовать на одних занятиях для отработки прямолинейности движения, а в других занятиях – для управления на расстоянии.
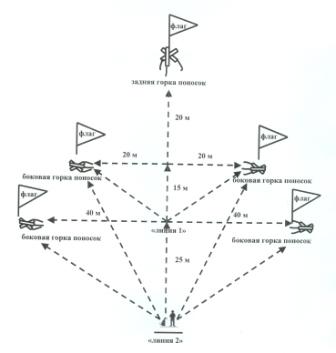
Выполнять упражнение «Пять лучей» будет проще, если вы и ваша собака переместитесь на ближний перекресток (рис. 17.).
Упражнение «Бродилка» является лучшим для обучения собаки всем жестам-командам в любую погоду и на любой местности. Но упражнение «Двойной крест» поднимает навык перенаправления под углом на новый уровень, благодаря присутствию отвлекающих факторов.
Если вас не волнует что собака бежит не по идеальной прямой, вы можете не разучивать это и следующие два упражнения. «Двойной крест» – это просто усовершенствованная версия упражнения «Крест». В нем добавлена вторая пара «боковых» лучей, которая позволяет не только повторять левые и правые «Вбок!», но также обучить движению под углом по жестам-командам (рис. 16).

Одним из важных условий успешной подачи «скрытой цели» является возможность скорректировать курс движения собаки на расстоянии в новом направлении. Для этого собака должна по команде свистком остановиться, повернуться мордой к вам, увидеть вашу команду-жест и выполнить ее.
С самого раннего детства вы обучали щенка садиться, поворачиваться и смотреть прямо на вас, когда она слышит одиночный сигнал свистком. Он должен знать команду «Смотри!» или другую, которую вы используете для того, чтобы он посмотрел на вас.
После того как ретривер освоил основы движения по прямой на короткие дистанции в упражнениях серии «Колесо», настало время увеличить расстояния (упражнение «Прямо и далеко») и обучить выдерживать прямолинейность движения независимо от того, как меняется рельеф местности на пути к «цели» (упражнение «Прямо через препятствия»).
Для упражнения «Прямо и далеко» желательно найти поле, на котором можно будет расположить три поста, которые образуют угол в 90 градусов и расстояние от линии до них будет порядка 100 метров (рис.14).